استفاده از مارهای رباتیک در جراحیهای پیچیده
محققان میگویند رباتهای شبیه به مار میتوانند در جراحیهای مختلف برای نجات جان انسانها مورد استفاده قرار گیرند و فقط هم به این حوزه محدود نمیشوند و کاربردهای مفید زیادی دارند.
به گزارش هفتگرد و به نقل از آیای، وقتی صحبت از رباتیک میشود، به نظر میرسد مهندسان اغلب از مارها الهام میگیرند. در گذشته، رباتهای شبیه به مار را دیدهایم که خطوط لوله را در کف اقیانوس تعمیر میکنند. همچنین ماشینهای الهامگرفته شده از مارها که در شن و خاک چاله حفر میکنند و رباتهای مار مانند که در مواقع اضطراری قابل استفاده هستند.
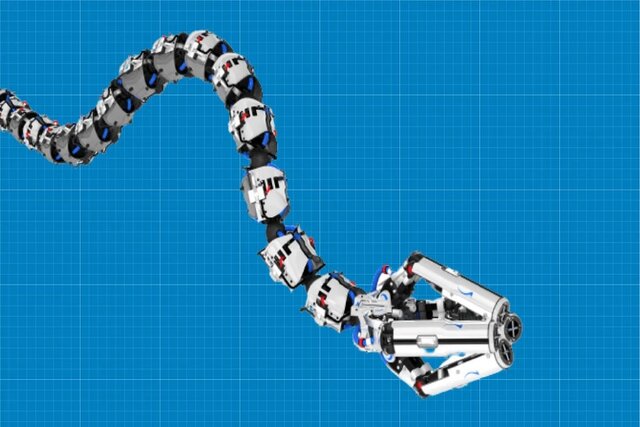
طبق یک بیانیه مطبوعاتی، اکنون تیمی به رهبری “جسیکا برگنر-کهرس” مدیر آزمایشگاه رباتیک “کانتینیوم”(Continuum) در دانشگاه “تورنتو میسیساگا”(Toronto Mississauga)، در حال ساخت رباتهای بسیار باریک، انعطافپذیر و قابل توسعه هستند که میتوانند توسط پزشکان برای نجات جان انسانها استفاده شوند. این رباتها این کار را با دسترسی به نقاط صعب العبور بدن و دور از دسترس انسان انجام میدهند.
محققان میگویند، یک جراح مغز و اعصاب را در نظر بگیرید که نیاز به برداشتن تومور مغزی دارد. جراح با استفاده از یک ابزار سنتی و سفت و سخت باید با دنبال کردن مسیری مستقیم در مغز به توده سرطانی برسد که خطر نفوذ و آسیب رساندن به بافت حیاتی را در پی دارد.
“جسیکا” روزی را پیشبینی میکند که یکی از رباتهای مار مانند با هدایت یک جراح بتواند مسیری پر پیچ و خم را در اطراف بافت حیاتی طی کند و به سلامت و ایمن به محل دقیق جراحی برسد.
با این رباتها، تومورهای مغزی که قبلاً غیرقابل عمل بودند، به طور ناگهانی قابل جراحی میشوند. این کار کوچکی نیست و میتواند روزی صنعت پزشکی را متحول کند. محققان حتی در حال کار بر روی مدلهای نیمه مستقلی هستند که روزی میتوانند خودشان راه را پیدا کنند و خود را راهنمایی کنند.
البته جراحان باید این رباتها را در جهت درست هدایت کنند، اما این رباتها نیز میتوانند از حسگرهای خود برای اجتناب از موانع در مسیرشان استفاده کنند. بنابراین توسعه این رباتها، عملهای جراحی را آسانتر و ایمنتر میکند.
سه سوالی که کار محققان را هدایت میکند
“جسیکا” میگوید برای دستیابی به این هدف والا، کار خود را با هدف پاسخ به سه سوال زیر هدایت میکند:
چگونه میتوانیم رباتهای پیوسته را کنترل کنیم، به طوری که آنها با دقت بیشتری در محیطهای محدود و پر پیچ و خم حرکت کنند؟
چگونه میتوانیم رابط شهودیتری بین انسان و ربات طراحی کنیم؟ آیا میتوانیم به یک ربات کاملا خودمختار دست پیدا کنیم؟
چگونه میتوانیم از چندین ربات پیوسته در پشت سر هم برای تکمیل یک کار مشترک استفاده کنیم؟
محققان همچنین در حال آزمایش اشکال جدیدی از رباتهای شبیه به مار هستند که حتی ماهرانهتر و توسعهپذیرتر هستند. یکی از مدلهای اخیر از اوریگامی(هنرِ تا زدن ژاپنی) الهام گرفته شده است، به این معنی که بسیار سبک است و میتواند تا ۱۰ برابر بیشتر از طرحهای دیگر توسعه یابد. این ویژگی آن را برای برنامههای جستجو و نجات ایدهآل میکند.
واضح است که مارهای رباتیک میتوانند در اشکال و اندازههای مختلف با طیف وسیعی از کاربردها تولید شوند. این بدان معنی است که پتانسیل آنها به یک صنعت محدود نمیشود. در واقع، توسعه این رباتهای چند منظوره ممکن است زندگی ما را در آینده متحول و بسیاری از کارهای پیچیده را ساده کند.